Exploiting Heterogeneity
Funding:MAST-CTA
Students: P. J. Cruz, A. Stuntz
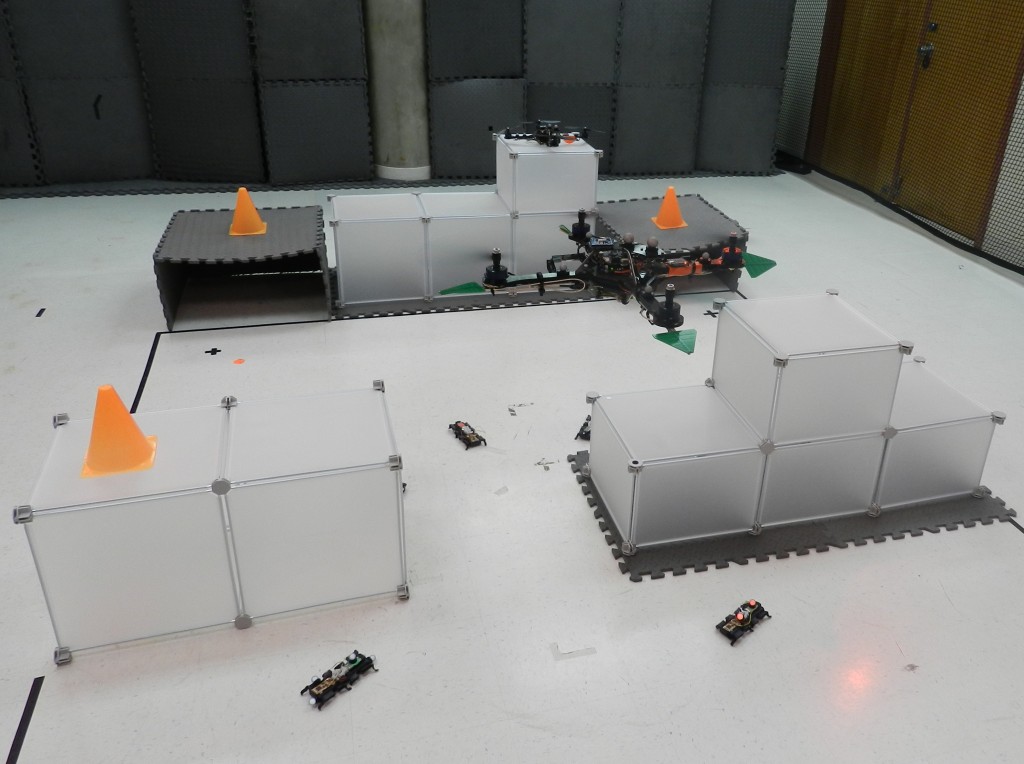
We envision a scenario in which aerial vehicles (e.g., quadrotors) interact with ground robots (e.g., OctoRoACHes) for fast explorations in hazardous environments. When dealing with such systems, the communication in the network is fundamentally important due to the uncertainties of the wireless channels. In this project, we pursue strategies to enhance the connectivity of a network made of heterogeneous agents and a fixed base station. We are motivated by those situations where the communication infrastructure is not available or suddenly discontinued and in which the environment is partially known. By using multiple platforms with different properties, we can explore an area and detect targets, mobile or stationary, faster. However, due to several limitations in the communication channel, when the transmission is through air medium and we are dealing with multiple vehicles, complications appear such as sharing information, synchronization, and routing. To address such limitations we develop, simulate, and implement on micro-sized robotic platforms motion planning algorithms based on adaptive navigation functions and approximate dynamic programming (ADP).

Mutual communication among flying/hovering quadrotors and ground-based OctoRoACHes is required for coordinated task execution. While a portion of this communication can be on a broadcast basis, e.g. RF-based, secure and spatially-separated communication pathways are also required for stealth operations. One of the project’s goals is to evaluate experimentally line-of-sight optical wireless communications between these platforms for compatibility with such operations. To simplify tasks, aerial vehicles would carry the optical transmitters and the ground moving sensors would be equipped with optical receivers for a one-way secure channel of communication, while parallel RF channels would provide mutual, global, and other non-secure communication links. The quadrotors' ability to hover allows to direct a line-of-sight optical beam towards a single or a selected few OctoRoACHes would enable recipient selection.
Related Publications
- Sensor Localization Using Hybrid RF/Optical Wireless Communications for an Aerial Data Mule, ACC, 2016 (Submitted)
- A target tracking approach to enable optical wireless communication between aerial and ground robots, IEEE TRO, 2015. (Submitted)
- Building coalitions of heterogeneous agents using weighted bipartite graphs, IEEE CDC, 2015. (Accepted)
- Towards optical wireless communications between micro unmanned aerial and ground systems, ICUAS, pp. 669-676, 2015
- Enabling optical wireless communication between aerial and ground robots, IEEE ICRA, poster session, 2015
- Stable formation of groups of robots via synchronization, IEEE IROS, pp. 376-381, 2014
- Synchronization of Heterogeneous Wireless Robotic Networks, WISeNET, 2014
- Maintaining robust connectivity in heterogeneous robotic networks, SPIE, 2014
