Multi-Agent, Robotics, and Heterogeneous Systems Laboratory
At the UNM MARHES Laboratory, we lead innovative research in mobile sensor networks, cooperative control of unmanned vehicles, and hybrid systems. Our expertise spans developing adaptive sensor networks for data retrieval and object identification, advancing UAV and UGV coordination, and exploring hybrid systems in robotics, embedded systems, and smart infrastructure. Through these efforts, we strive to push the boundaries of autonomous systems and intelligent control.
Mobile Sensor Networks
The objective of this research is to develop an adaptive network of distributed sensors capable of accomplishing a broad spectrum of tasks ranging from retrieving, manipulating, and synthesizing information to identifying and locating physical objects.
Cooperative Control of Unmanned Vehicles
As small, low-cost, and expendable vehicles(UAV, UGV) become available they can be used for many functions such as reconnaissance, search, and over-the-horizon communications. In these projects, we propose to develop the methodology and the support software for the coordination of heterogeneous teams of unmanned vehicles.
Hybrid Systems
Applications of hybrid systems include embedded systems, biological systems, automated highway systems, air traffic controllers, communications networks, and robotics.

Navigating the Edge: UAS Boundary Tracing for Efficient Volcanic Plume Monitoring
Sketch is a dual-UAS algorithm designed for efficient real-time volcanic plume boundary tracing. It maintains an optimal flight path by ensuring one UAS stays inside the plume boundary (determined by CO2 concentration) while the other remains outside, adjusting based on real-time measurements. Implemented on the Dragonfly drone, Sketch was tested in simulations and real-world environments using virtual plumes. Compared to the single-UAS Zigzag algorithm, Sketch achieved shorter flight paths, fewer turns, and faster mapping, though Zigzag provided slightly more accurate plume area estimates. Overall, Sketch offers an efficient solution for real-time volcanic plume monitoring and CO2 emission estimation.
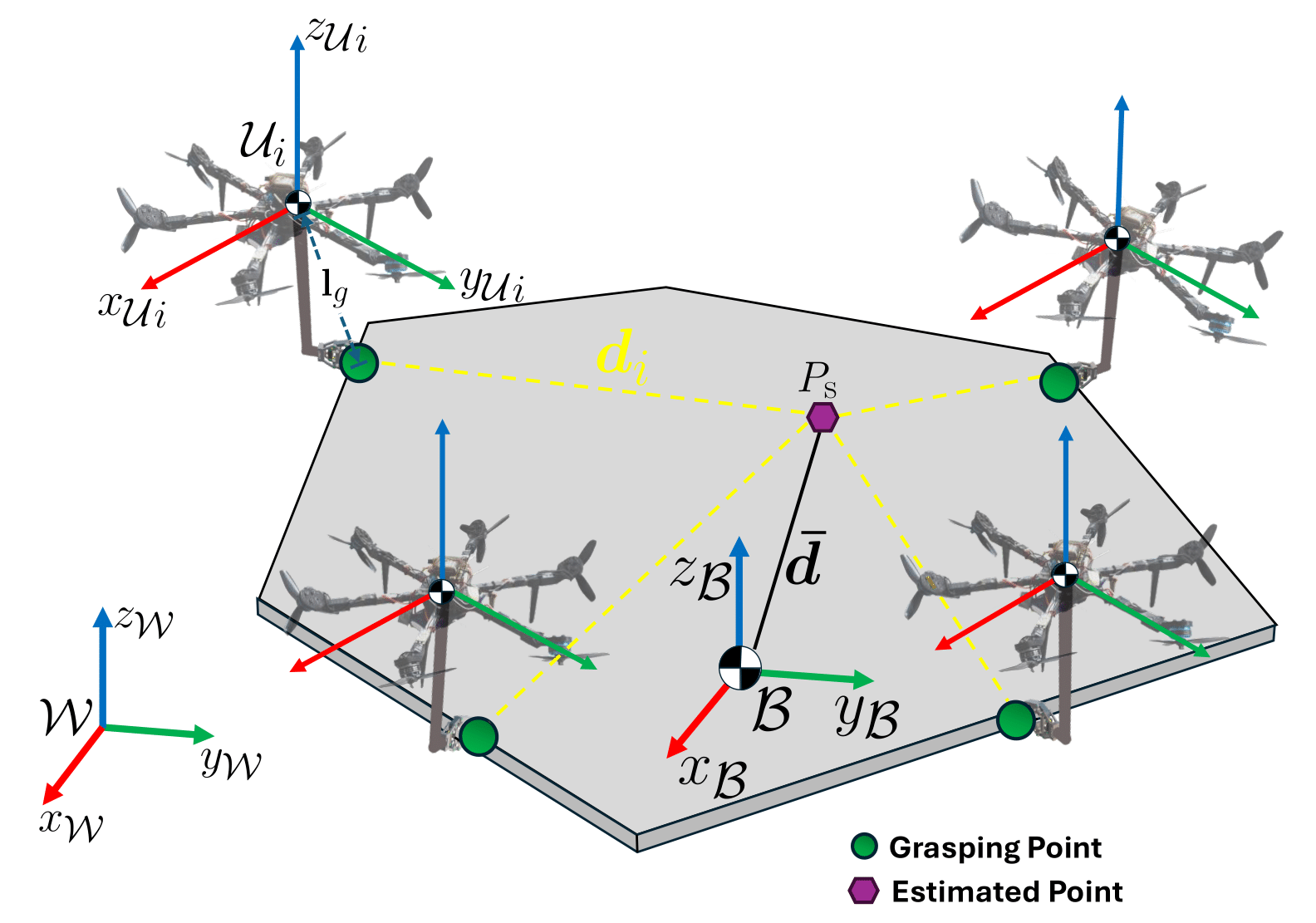
Decentralized adaptive aerospace transportation of unknown loads using a team of robots
Transportation missions in aerospace are limited to the capability of each aerospace robot and the properties of the target transported object, such as mass, inertia, and grasping locations. We present a novel decentralized adaptive controller design for multiple robots that can be implemented in different kinds of aerospace robots. Our controller adapts to unknown objects in different gravity environments. We validate our method in an aerial scenario using multiple fully actuated hexarotors with grasping capabilities, and a space scenario using a group of space tugs. In both scenarios, the robots transport a payload cooperatively through desired three-dimensional trajectories. We show that our method can adapt to unexpected changes that include the loss of robots during the transportation mission.
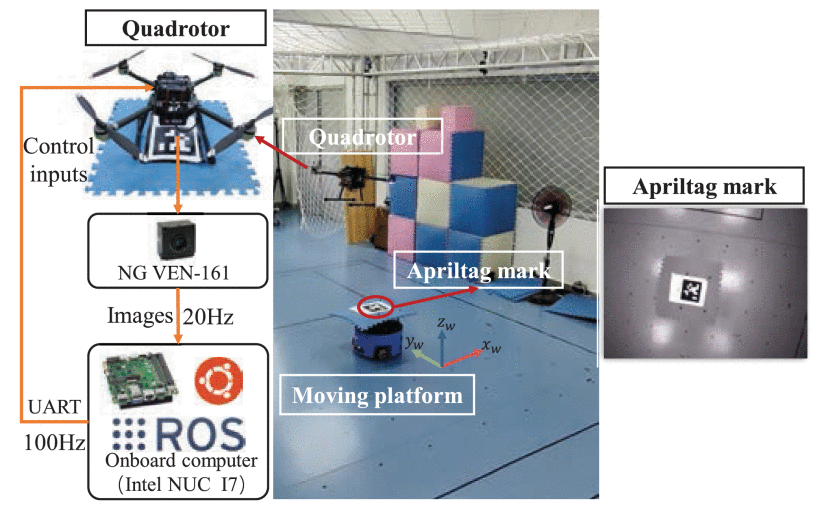
Vision-Based Safety-Critical Landing Control of Quadrotors With External Uncertainties and Collision Avoidance

Control for an Omnidirectional Multi-rotor UAV for Space Applications
Omnidirectional multi-rotor platforms are well suited to verify, validate, and test multi- satellite collaborative autonomous algorithms in a terrestrial laboratory. Unlike conventional multi-rotors, an omnidirectional configuration enables the vehicle to produce an arbitrary combination of forces and torques to emulate satellite dynamics unattainable with conventional designs. We achieve this by: i) Controlling the omnidirectional multi-rotor to track a reference trajectory, done here using custom controllers programmed within a ROS2 framework. ii) On-the-fly generation of a reference trajectory identical to the one experienced by a real satellite. In this work we demonstrate the capabilities of such an omnidirectional multi-rotor, as well as provide examples for generating these trajectories in accordance with the Clohessy-Wiltshire relative motion equations.