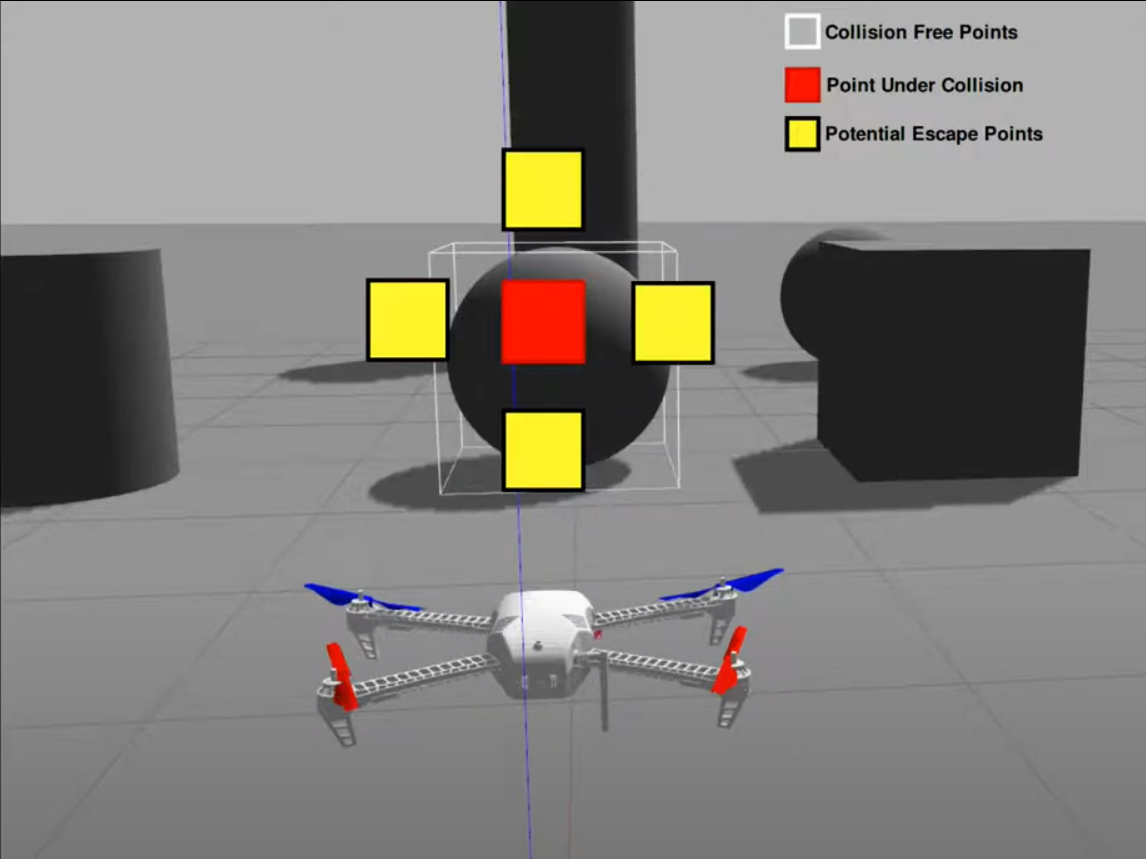
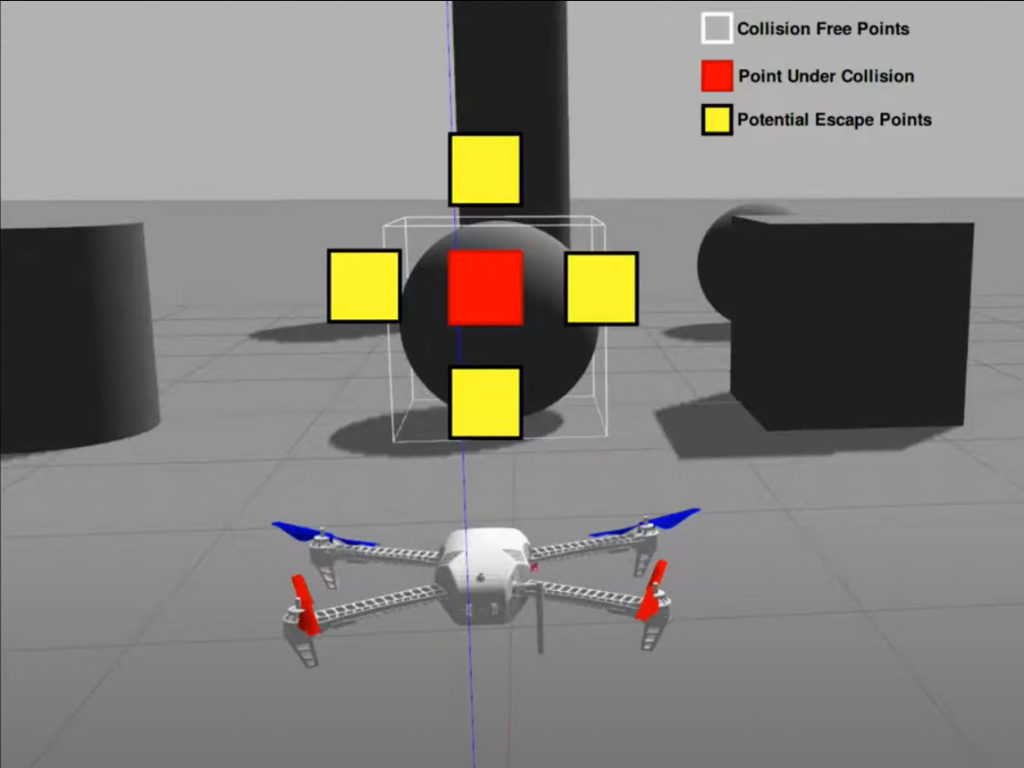
This research is inspired by a popular computer game “Race the Sun”, where a UAV has to reach as far as possible consuming solar energy while the sun sets slowly. Hence, while maneuvering forward it has to save energy and form trajectories around obstacles at the same time. A similar idea is used along-with the real-time trajectory generation techniques combined with stereo vision. Multi-threading features in the Robot Operating System (ROS) and C++ are utilized to achieve parallel trajectory generation and execution. OpenCV is extensively used for image processing tasks. The hardware is also developed to run the proposed algorithm. Jetson TX2 is used to perform all the computations onboard and a forward-facing ZED-mini stereo camera is used to provide visual odometry and the depth image stream to be used by the planning algorithm for further processing. The system is completely independent and does not need any GPS or motion capture system as well, to navigate.
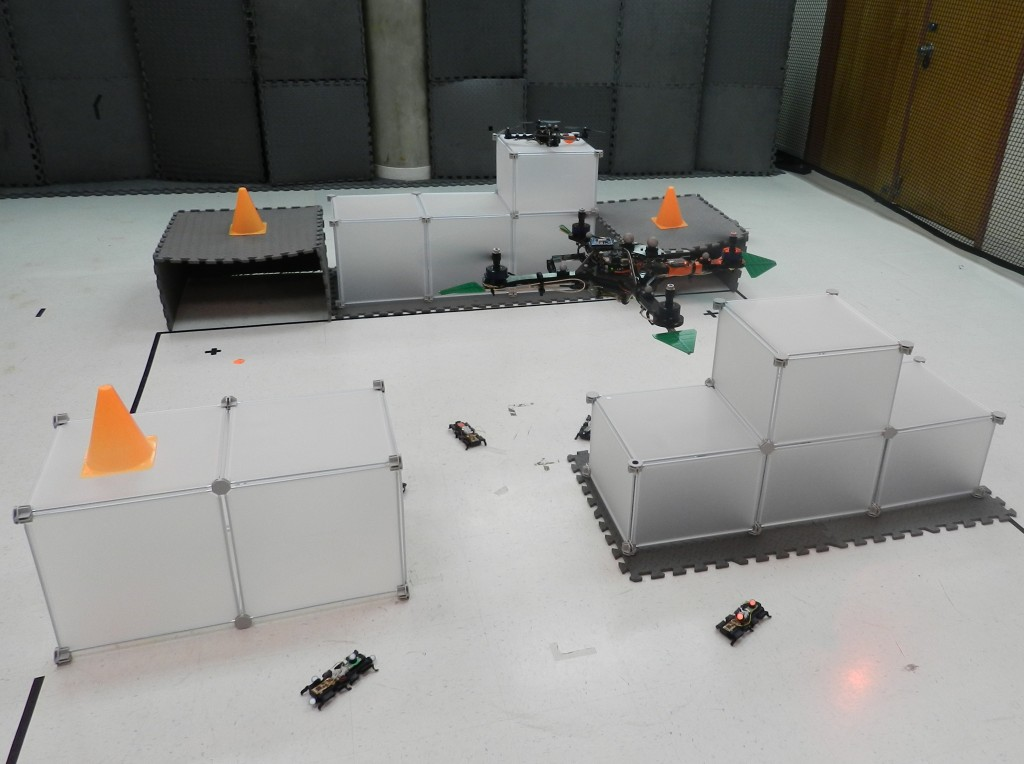
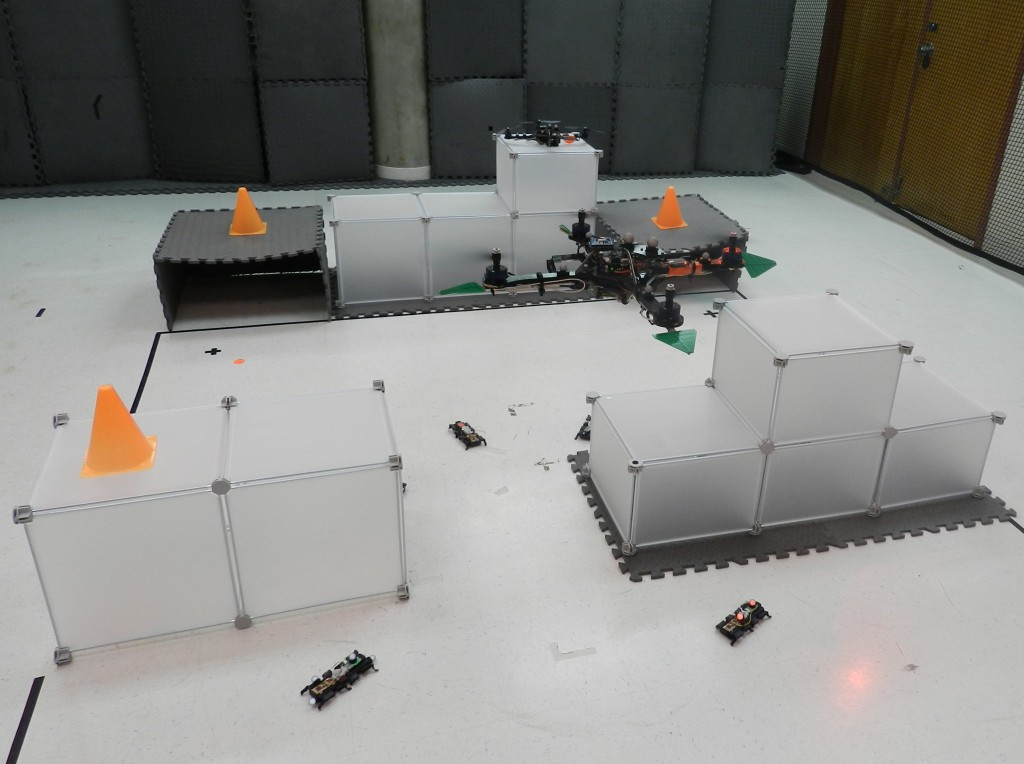
miniROaCH is a small-scale, affordable, and portable multi-vehicle robotic platform, capable of running Linux, and hence Robot Operating System (ROS) on-board. The purpose of this research is to simulate and implement a small-scale swarm testbed based on these miniROaCHes. Developing a swarm testbed can be difficult in terms of robot localization. The proposed testbed aims to tackle this difficult issue by utilizing an aerial vehicle used to monitor and publish the locations and orientations of the swarm’s ground agents. The testbed consists of one quadrotor and multiple crawler robots. The team plans to build a mobile motion capture system so that experiments can be done both indoors and outdoors. The system is able to precisely estimate the poses of multiple ground robots with respect to the absolute world frame. A quadrotor UAV with a downward-facing camera is used to detect the relative poses of the ground robots in its field of view. The poses of each ground robot are ultimately transformed into the world frame through proper transformation calculations. The pose of the quadrotor is measured with respect to the world frame for the transformation.
Approach
The research is divided mainly into two parts:
Simulation: Gazebo is used to create an environment with a hovering quadrotor, miniROaCH ground robot models, and a camera mounted beneath the quadrotor. AprilTags are used on the ground robots to detect their unique positions relative to the quadrotor frame which is ultimately transformed into the world frame.
Practical implementation of the system: A tripod mount with a camera facing downwards is used to measure the relative poses of the miniROaCHes on the tabletop. An AprilTag package for ROS is used to decode the AprilTags posted on the ground robots. Once the transform tree in ROS is available, a simple swarm control algorithm is demonstrated with the system.
We envision a scenario in which aerial vehicles (e.g., quadrotors) interact with ground robots (e.g., OctoRoACHes) for fast explorations in hazardous environments. When dealing with such systems, the communication in the network is fundamentally important due to the uncertainties of the wireless channels. In this project, we pursue strategies to enhance the connectivity of a network made of heterogeneous agents and a fixed base station. We are motivated by those situations where the communication infrastructure is not available or suddenly discontinued and in which the environment is partially known. By using multiple platforms with different properties, we can explore an area and detect targets, mobile or stationary, faster. However, due to several limitations in the communication channel, when the transmission is through air medium and we are dealing with multiple vehicles, complications appear such as sharing information, synchronization, and routing. To address such limitations we develop, simulate, and implement on micro-sized robotic platforms motion planning algorithms based on adaptive navigation functions and approximate dynamic programming (ADP).
Mutual communication among flying/hovering quadrotors and ground-based OctoRoACHes is required for coordinated task execution. While a portion of this communication can be on a broadcast basis, e.g. RF-based, secure and spatially-separated communication pathways are also required for stealth operations. One of the project’s goals is to evaluate experimentally line-of-sight optical wireless communications between these platforms for compatibility with such operations. To simplify tasks, aerial vehicles would carry the optical transmitters and the ground moving sensors would be equipped with optical receivers for a one-way secure channel of communication, while parallel RF channels would provide mutual, global, and other non-secure communication links. The quadrotors’ ability to hover allows to direct a line-of-sight optical beam towards a single or a selected few OctoRoACHes would enable recipient selection.