The Magic Carpet project is an innovative aerial robotics experiment conducted in Spring 2025 at the MARHES Lab. This project explores soft, underactuated platforms for aerial locomotion, using a novel flexible surface suspended by tethers and actuated by aerial thrust.
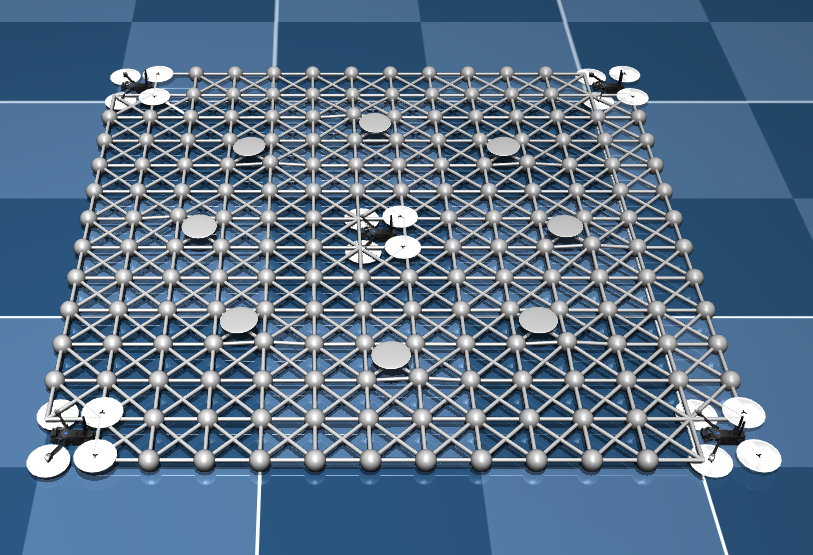
The system, dubbed the “Magic Carpet,” consists of a pliable fabric sheet suspended in midair and stabilized by a set of coordinated propellers. Each corner is attached to an independent tethered thrust unit, enabling lift and basic attitude control. Unlike traditional rigid-body drones, this platform showcases compliance and passive damping, making it ideal for interaction in cluttered or sensitive environments.
The videos demonstrate the Magic Carpet hovering in place and dynamically responding to inputs, revealing promising results in stability and control despite its unconventional structure. The system was designed and tested by researcher Kevin Aubert, who continues to explore ways to improve its robustness and expand its capabilities.
This project reflects the MARHES Lab’s ongoing commitment to developing new paradigms for mobility in aerial robotics—especially those that depart from traditional rigid and over-actuated designs.
Stay tuned for future updates as the Magic Carpet continues its journey toward controlled soft aerial locomotion.
The team implemented SKETCH, a real-time boundary-tracing algorithm using two UAVs to detect and trace volcanic CO₂ plume edges. One UAV flies inside the plume boundary and another outside, adjusting paths based on real-time gas readings to maintain a “sandwich invariant.” Compared to a baseline single-drone strategy (ZIGZAG), SKETCH offered significant efficiency gains—shorter flight paths, less turning, and faster mapping times—without sacrificing boundary-tracking accuracy.
Field tests were conducted with physical Dragonfly drones in simulated and natural environments, including Balloon Fiesta Park and the Valles Caldera supervolcano in New Mexico. In simulation and real-world scenarios, SKETCH outperformed traditional mapping strategies, demonstrating robust performance even in complex multi-plume structures and narrow “dumbbell” configurations.
Gradient Descent and Rasterization Mapping
Earlier phases of VolCAN demonstrated the Dragonfly swarm’s ability to autonomously follow CO₂ gradients using a modified flocking algorithm, allowing UAVs to collaboratively locate emission sources. Rasterization techniques, including lawnmower and spiral search algorithms, were used for large-area mapping, while Kriging interpolation was applied to create CO₂ concentration heatmaps.
Impact and Future Directions
The VolCAN project reduces the risk to human researchers, improves temporal resolution in gas monitoring, and provides tools for better volcanic eruption prediction. The SKETCH system bridges the theory-implementation gap in autonomous boundary tracing and lays the foundation for future applications in environmental robotics, including hazardous leak detection and industrial monitoring.
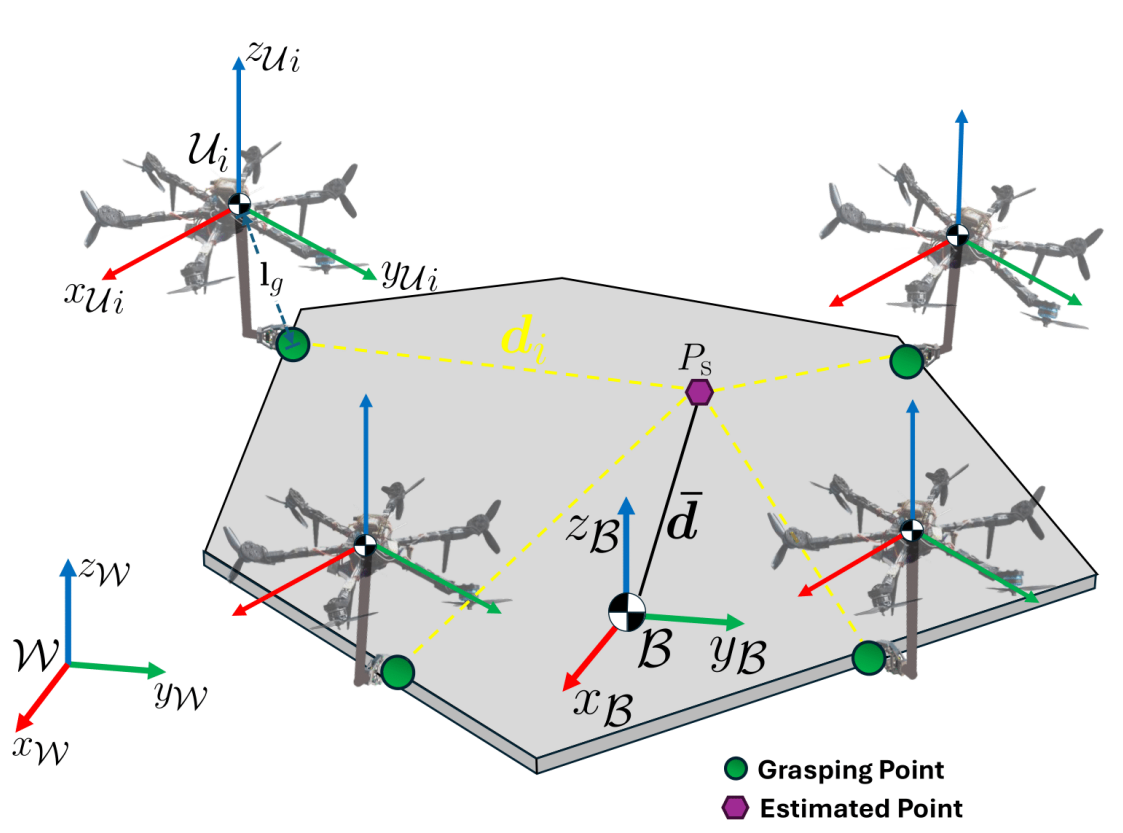
This project developed a decentralized adaptive controller for aerospace robots—including hexarotors and space tugs—to cooperatively transport unknown payloads in both Earth and zero-gravity environments. The system dynamically adapts to changes in object mass, inertia, and grasping points without prior knowledge. Using simulations in MuJoCo, researchers validated robust 6-DoF payload manipulation, even under robot loss scenarios. This work supports scalable and fault-tolerant aerial and space logistics and satellite servicing.