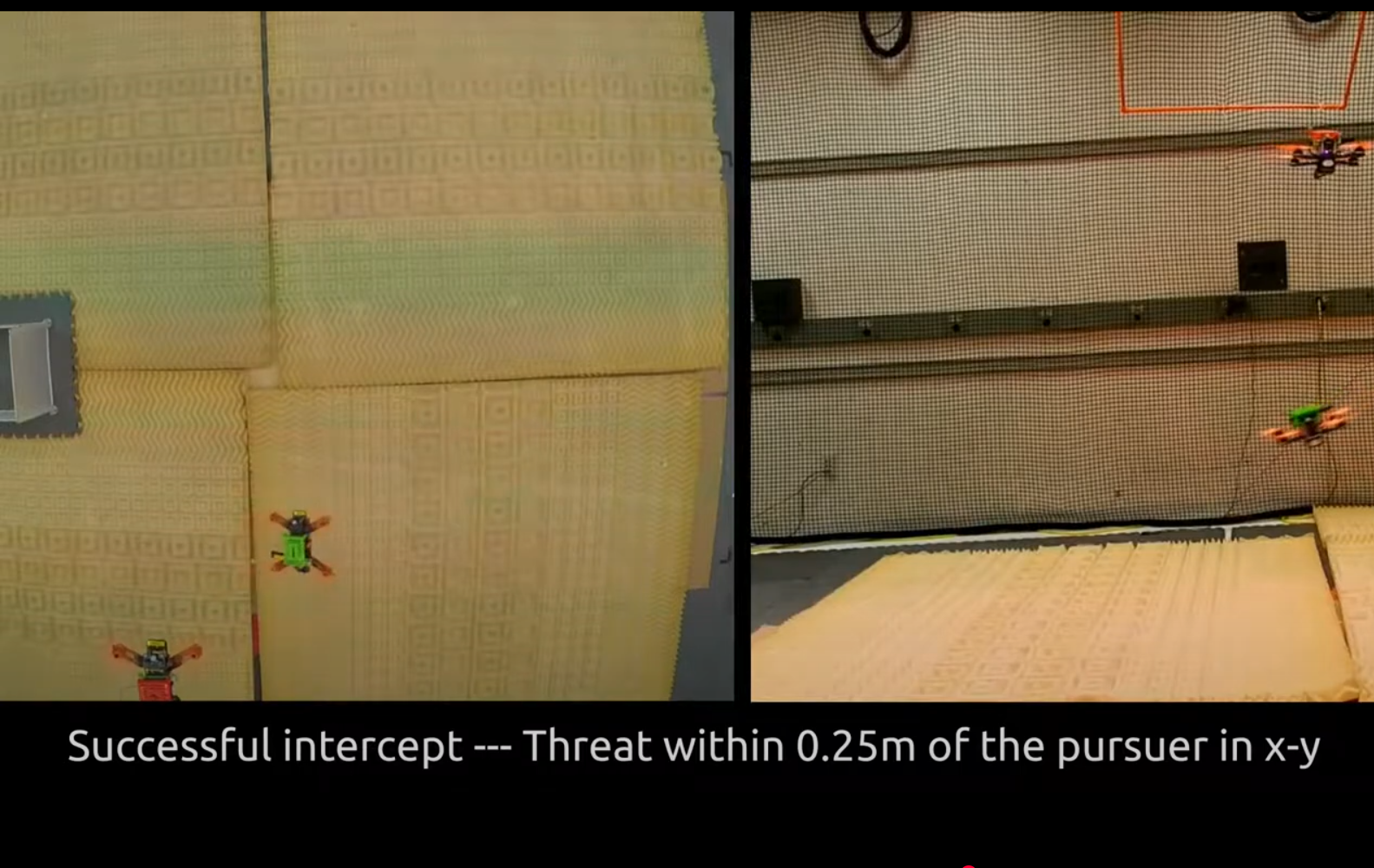
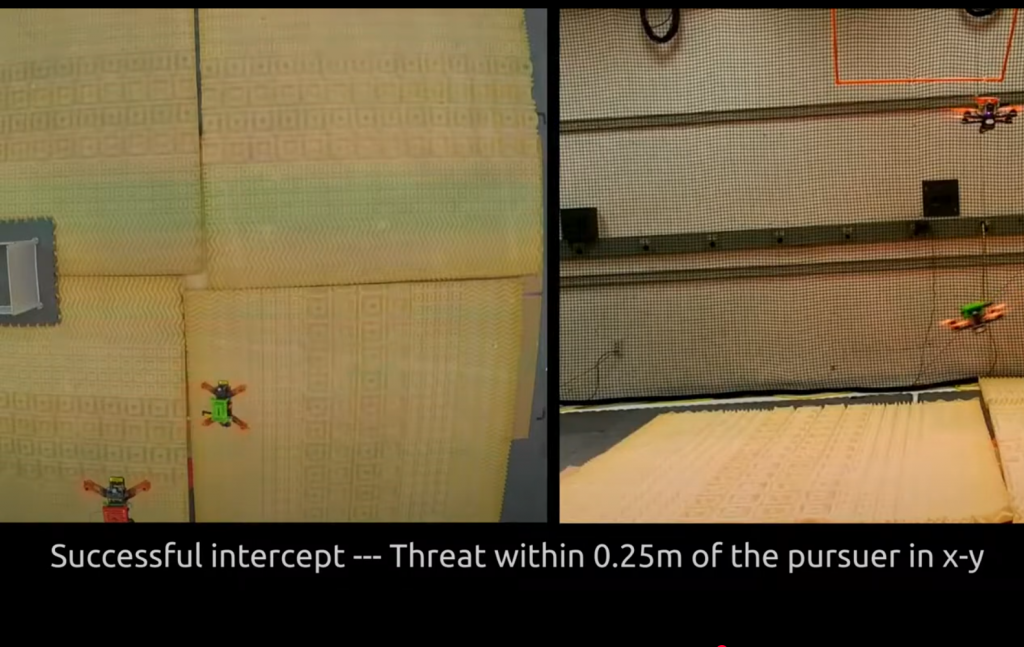
This research focuses on Aerial Suppression of Airborne Platform (ASAP). A famous pursuit-evasion problem is solved using forward stochastic reachability. The work is done in collaboration with Sandia National Labs and Dr. Meeko Oishi’s group at UNM. The problem focuses on the pursuer’s trajectory planning to intercept the threat before it reaches the asset.
A universal inverted pendulum has been implemented by using a quadrotor with an underactuated load attached. The system can function as a flying linear and rotary inverted pendulum without any physical modification. Such an agile system has applications ranging from off-centered suspended load transportation to package delivery to flying cars to control education. The robust hybrid control scheme proposed, is able to overcome the challenges that come with using a quadrotor as the actuator for the pendulum. A complete simulation of the system in a ROS/Gazebo environment has been implemented and discussed. The simulations gave the team a lot of insight into the implementation, especially since both systems use ROS structure. This has the advantage that the control nodes developed for the simulation can be used in a similar fashion on the real quadcopter. The real system is currently under development and shows promising results. The AscTec Hummingbird that is used has been equipped with an Odroid XU-4 onboard microprocessor, which runs ROS environment on a Ubuntu 14.04 operating system. An 8mm carbon fiber tube is used as a pendulum and a ceramic ball bearing is used as a pivot for it. To attach the pendulum to the quadrotor carbon fiber tube in combination with specially designed 3D printed parts are used.