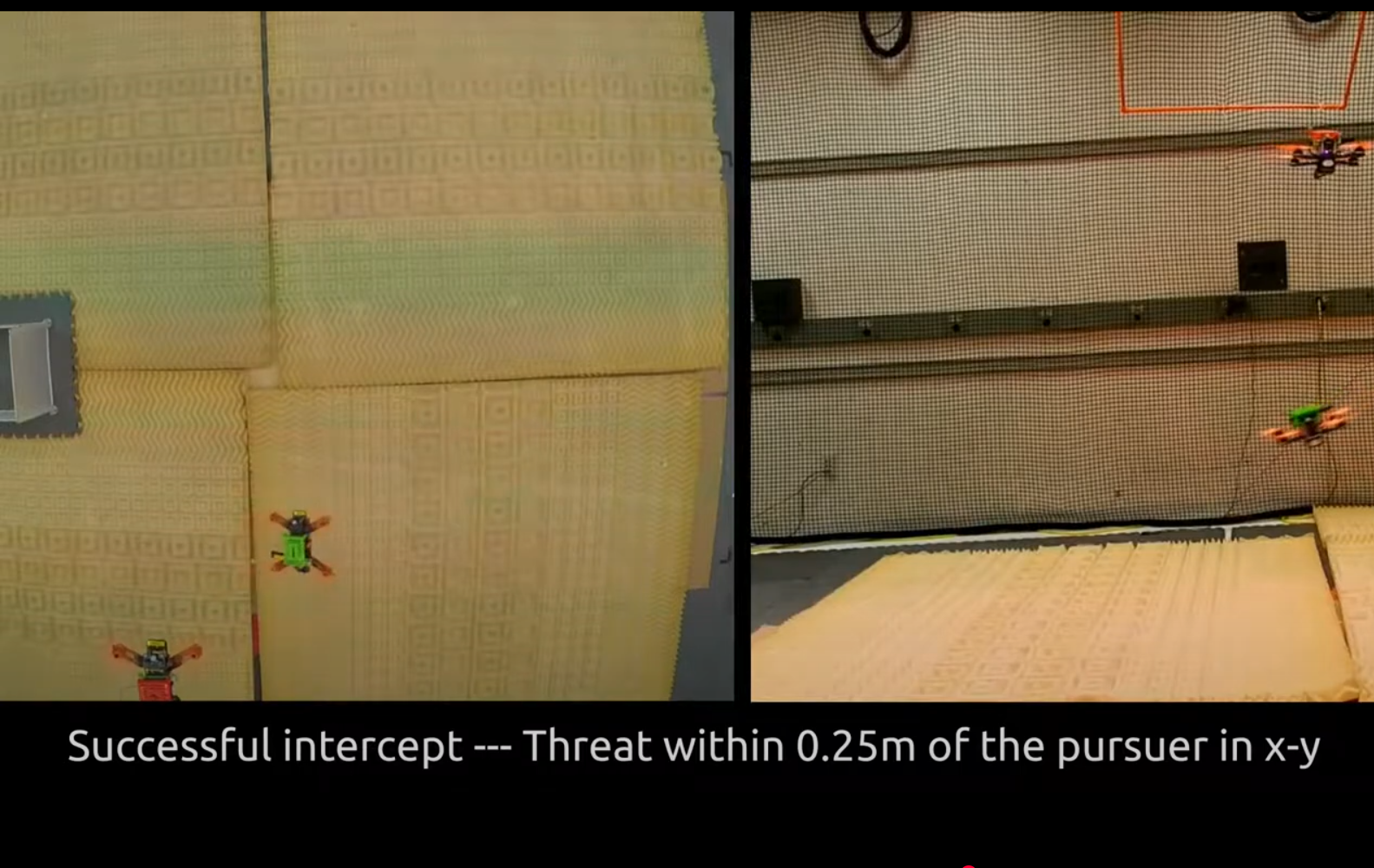
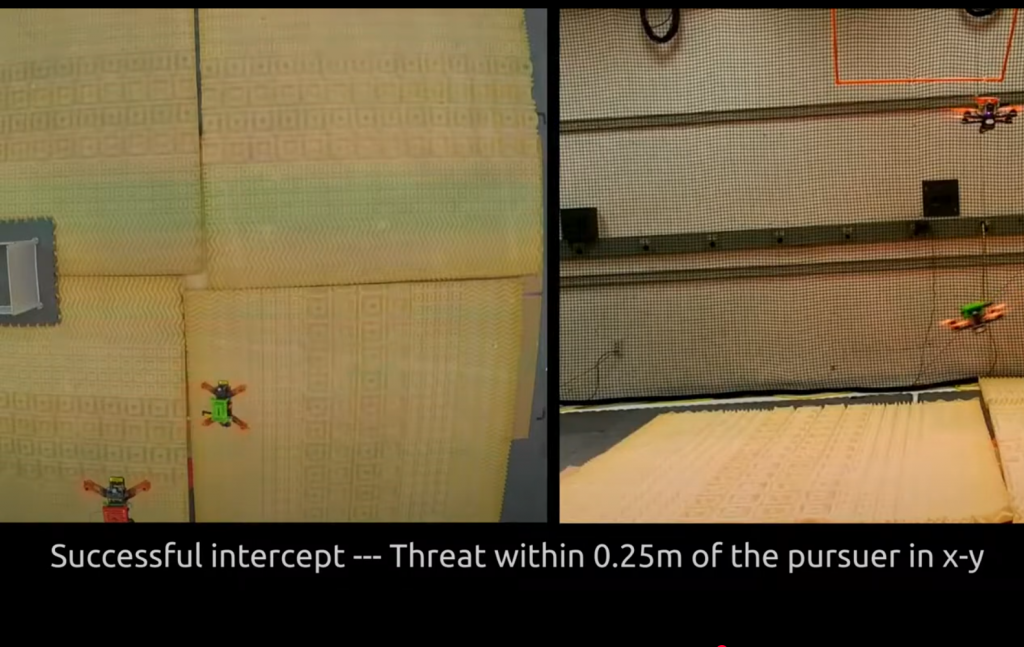
This research focuses on Aerial Suppression of Airborne Platform (ASAP). A famous pursuit-evasion problem is solved using forward stochastic reachability. The work is done in collaboration with Sandia National Labs and Dr. Meeko Oishi’s group at UNM. The problem focuses on the pursuer’s trajectory planning to intercept the threat before it reaches the asset.
The capstone for the project under Army Research Labs (ARL) Micro-Autonomous Systems and Technology (MAST) included the task of exploring an unknown environment using a heterogeneous robotics test-bed. The problem motivates from the fact that in usual search and rescue operations, there is a need for cheap robots and sensors to be deployed without worrying much about their loss or damage. For that purpose, a set of bio-inspired robots, the miniROaCHes are assembled at the MARHES Lab. They are built out of chassis from Kamigami robots by Dash Robotics. They are made capable of running Linux and hence the Robot Operating System (ROS) by mounting Raspberry Pi Zeros on-board. They are also assembled so that a forward camera can be mounted on-board to capture images. The idea is to explore an unknown environment by utilizing this camera on each of the deployed miniROaCH. These pictures are taken from different random poses. In order to overcome the problem of low memory on the ground robots, the quadrotor hovers over each one of them turn-by-turn to copy these pictures and dump them to the base station via an optical communication link. This base station is connected to a cloud server where the 3-D map is generated. ROS is used as the main software framework for all robots.
A universal inverted pendulum has been implemented by using a quadrotor with an underactuated load attached. The system can function as a flying linear and rotary inverted pendulum without any physical modification. Such an agile system has applications ranging from off-centered suspended load transportation to package delivery to flying cars to control education. The robust hybrid control scheme proposed, is able to overcome the challenges that come with using a quadrotor as the actuator for the pendulum. A complete simulation of the system in a ROS/Gazebo environment has been implemented and discussed. The simulations gave the team a lot of insight into the implementation, especially since both systems use ROS structure. This has the advantage that the control nodes developed for the simulation can be used in a similar fashion on the real quadcopter. The real system is currently under development and shows promising results. The AscTec Hummingbird that is used has been equipped with an Odroid XU-4 onboard microprocessor, which runs ROS environment on a Ubuntu 14.04 operating system. An 8mm carbon fiber tube is used as a pendulum and a ceramic ball bearing is used as a pivot for it. To attach the pendulum to the quadrotor carbon fiber tube in combination with specially designed 3D printed parts are used.
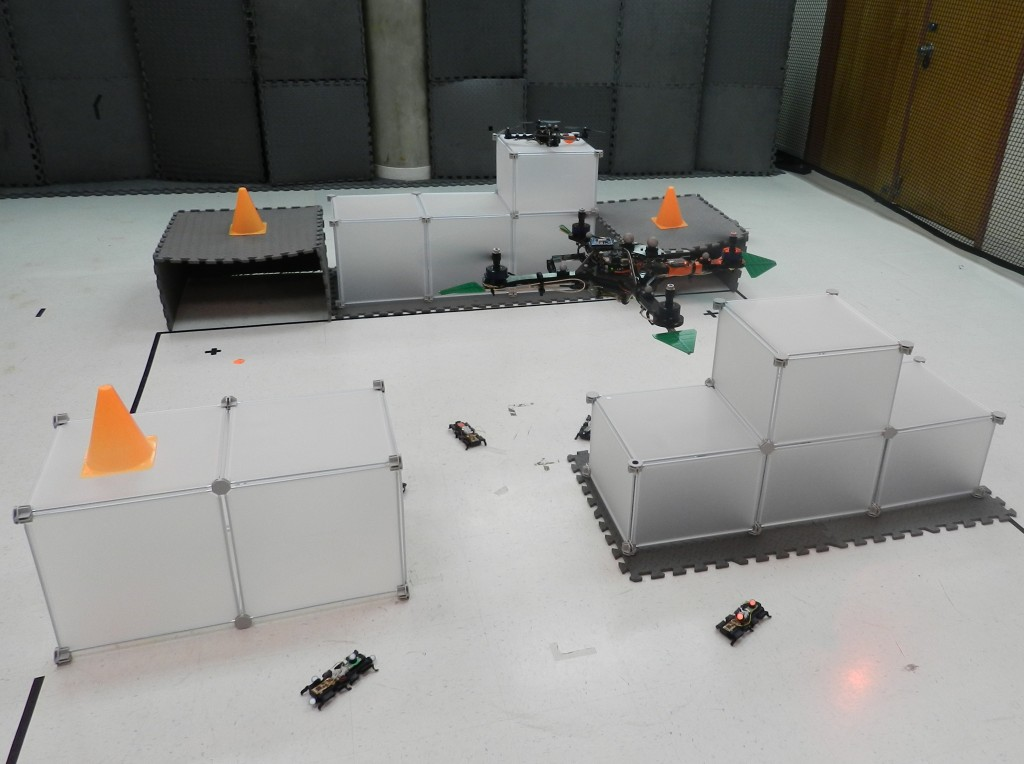
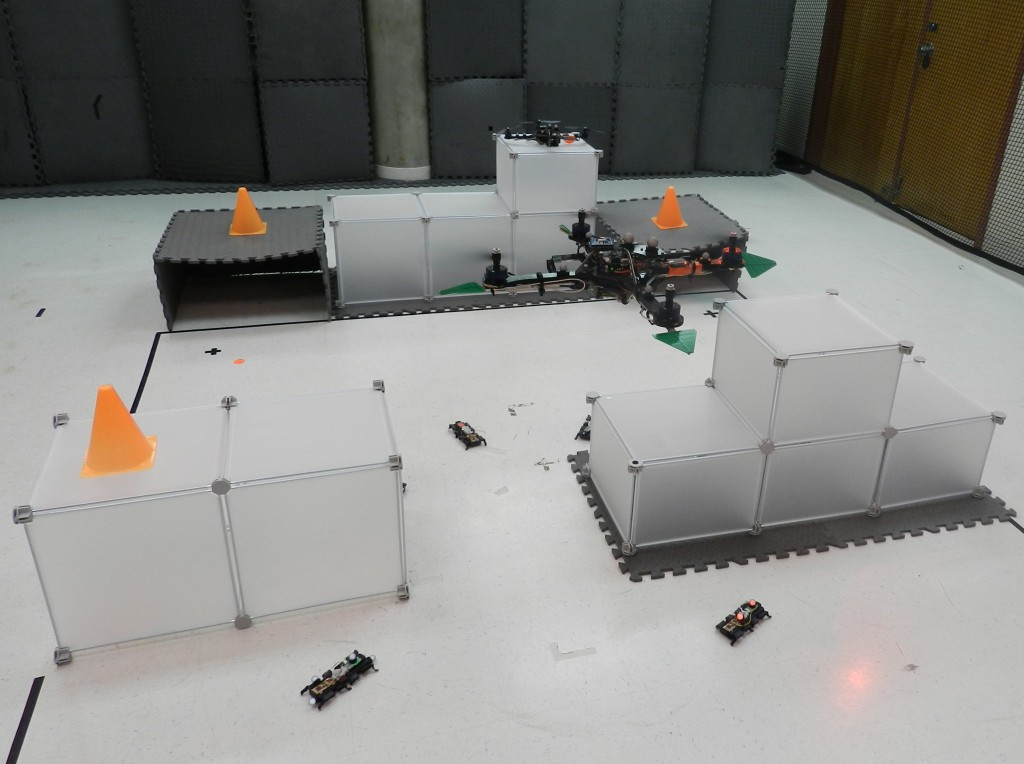
miniROaCH is a small-scale, affordable, and portable multi-vehicle robotic platform, capable of running Linux, and hence Robot Operating System (ROS) on-board. The purpose of this research is to simulate and implement a small-scale swarm testbed based on these miniROaCHes. Developing a swarm testbed can be difficult in terms of robot localization. The proposed testbed aims to tackle this difficult issue by utilizing an aerial vehicle used to monitor and publish the locations and orientations of the swarm’s ground agents. The testbed consists of one quadrotor and multiple crawler robots. The team plans to build a mobile motion capture system so that experiments can be done both indoors and outdoors. The system is able to precisely estimate the poses of multiple ground robots with respect to the absolute world frame. A quadrotor UAV with a downward-facing camera is used to detect the relative poses of the ground robots in its field of view. The poses of each ground robot are ultimately transformed into the world frame through proper transformation calculations. The pose of the quadrotor is measured with respect to the world frame for the transformation.
Approach
The research is divided mainly into two parts:
Simulation: Gazebo is used to create an environment with a hovering quadrotor, miniROaCH ground robot models, and a camera mounted beneath the quadrotor. AprilTags are used on the ground robots to detect their unique positions relative to the quadrotor frame which is ultimately transformed into the world frame.
Practical implementation of the system: A tripod mount with a camera facing downwards is used to measure the relative poses of the miniROaCHes on the tabletop. An AprilTag package for ROS is used to decode the AprilTags posted on the ground robots. Once the transform tree in ROS is available, a simple swarm control algorithm is demonstrated with the system.
The UNM MARHES Lab racing team, LoboRacers won 2nd place in the first-ever F1/10 International Autonomous Racing Competition at Carnegie Mellon University on October 1-2, 2016. The F1/10 Competition involves assembling, programming, and racing an autonomous car of the one-tenth scale of an actual Formula One race car. The objective of this competition is to motivate students to develop advanced algorithms that could be applied to self-driving cars in the future. The cars are programmed utilizing Python and Robot Operating System.
At the moment, the LoboRacers’ car runs a simple wall following an algorithm that uses distance measurements from five different angles collected with the LiDAR sensor. This way the car can determine how close it is to obstacles and at what rate is that distance from the obstacle changing, such that it may adjust its speed and/or turn accordingly to avoid collisions. The LoboRacers team is currently working on improving the car’s localization and mapping algorithms in preparation for the next race in 2017. The localization and mapping driving approach involves first creating a map of the desired path or “racetrack” by manually driving the car through remote control. Afterward, the driving algorithm is applied, and through the car’s odometry, it will be able to know where it is on the map and expect any upcoming turns, again adjusting its speed to avoid colliding with the edges of the track. This method should allow the car to drive faster and more efficiently, as it will no longer need to “sense” obstacles in real-time and can instead anticipate them and be prepared to execute its speed and direction altering commands.
We envision a scenario in which aerial vehicles (e.g., quadrotors) interact with ground robots (e.g., OctoRoACHes) for fast explorations in hazardous environments. When dealing with such systems, the communication in the network is fundamentally important due to the uncertainties of the wireless channels. In this project, we pursue strategies to enhance the connectivity of a network made of heterogeneous agents and a fixed base station. We are motivated by those situations where the communication infrastructure is not available or suddenly discontinued and in which the environment is partially known. By using multiple platforms with different properties, we can explore an area and detect targets, mobile or stationary, faster. However, due to several limitations in the communication channel, when the transmission is through air medium and we are dealing with multiple vehicles, complications appear such as sharing information, synchronization, and routing. To address such limitations we develop, simulate, and implement on micro-sized robotic platforms motion planning algorithms based on adaptive navigation functions and approximate dynamic programming (ADP).
Mutual communication among flying/hovering quadrotors and ground-based OctoRoACHes is required for coordinated task execution. While a portion of this communication can be on a broadcast basis, e.g. RF-based, secure and spatially-separated communication pathways are also required for stealth operations. One of the project’s goals is to evaluate experimentally line-of-sight optical wireless communications between these platforms for compatibility with such operations. To simplify tasks, aerial vehicles would carry the optical transmitters and the ground moving sensors would be equipped with optical receivers for a one-way secure channel of communication, while parallel RF channels would provide mutual, global, and other non-secure communication links. The quadrotors’ ability to hover allows to direct a line-of-sight optical beam towards a single or a selected few OctoRoACHes would enable recipient selection.
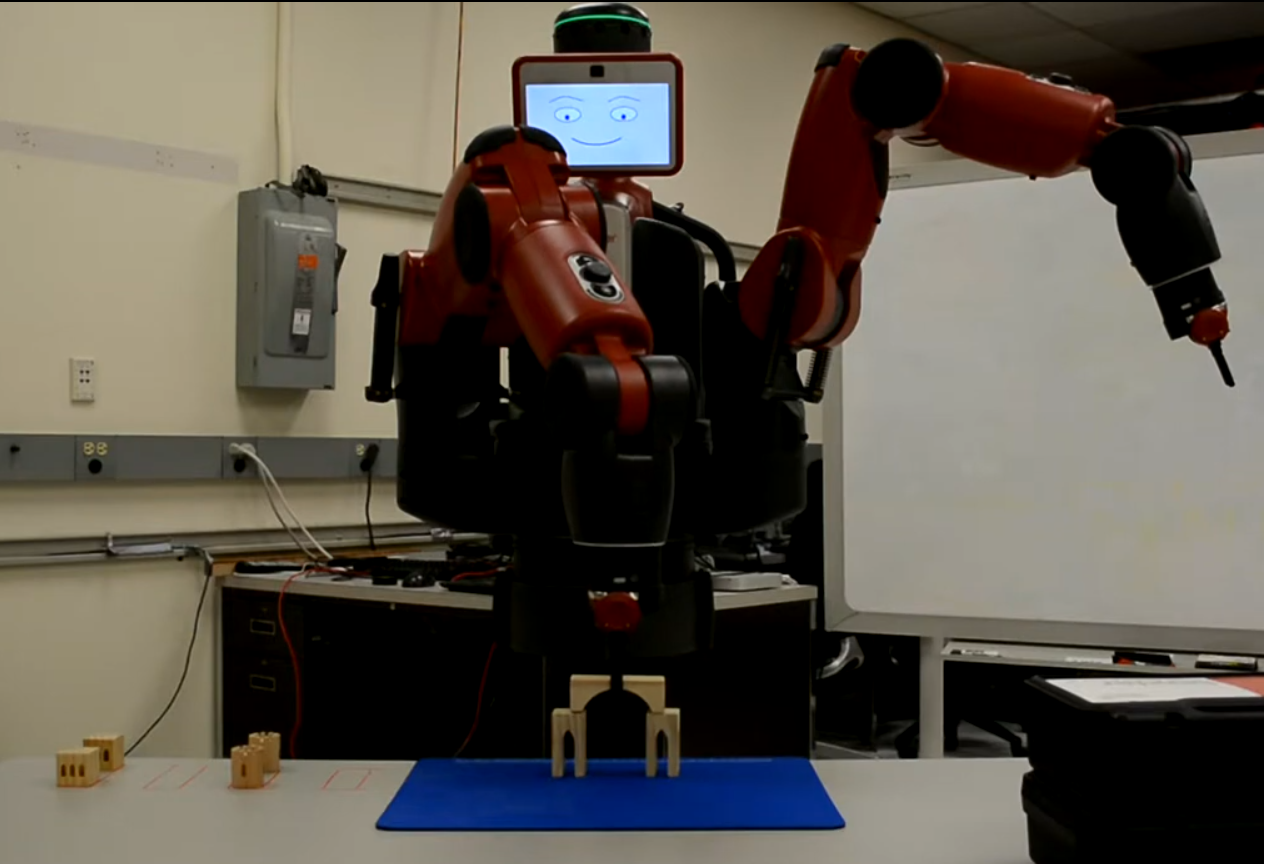
This work focused on ensuring safe and agile suspended load transport using quadrotors. Researchers implemented an adaptive controller to handle shifts in the quadrotor’s center of gravity during flight and applied dynamic programming to design swing-free trajectories. This combination allows precise and stable load manipulation even with uncertain dynamics, minimizing swinging motion. Applications include emergency supply delivery, landmine detection, and transport in cluttered environments.