

UNM Students: Kevin Aubert
Senior Contributors: Dr. Rafael Fierro (UNM)
The Magic Carpet project is an innovative aerial robotics experiment conducted in Spring 2025 at the MARHES Lab. This project explores soft, underactuated platforms for aerial locomotion, using a novel flexible surface suspended by tethers and actuated by aerial thrust.
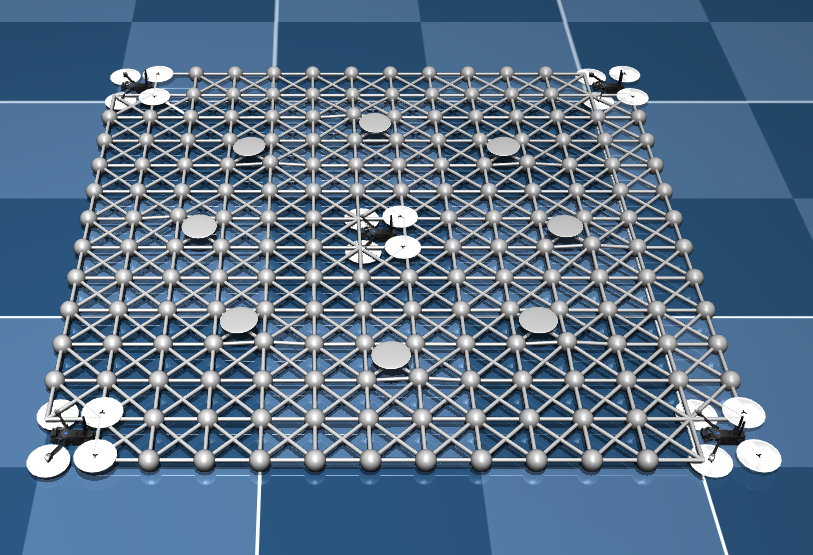
The system, dubbed the “Magic Carpet,” consists of a pliable fabric sheet suspended in midair and stabilized by a set of coordinated propellers. Each corner is attached to an independent tethered thrust unit, enabling lift and basic attitude control. Unlike traditional rigid-body drones, this platform showcases compliance and passive damping, making it ideal for interaction in cluttered or sensitive environments.
The videos demonstrate the Magic Carpet hovering in place and dynamically responding to inputs, revealing promising results in stability and control despite its unconventional structure. The system was designed and tested by researcher Kevin Aubert, who continues to explore ways to improve its robustness and expand its capabilities.
This project reflects the MARHES Lab’s ongoing commitment to developing new paradigms for mobility in aerial robotics—especially those that depart from traditional rigid and over-actuated designs.
Stay tuned for future updates as the Magic Carpet continues its journey toward controlled soft aerial locomotion.
Leave a Reply