

UNM Students: Longsen Gao, Kevin Aubert
Senior Contributors: Dr. Rafael Fierro (UNM), David Saldaña, Claus Danielson
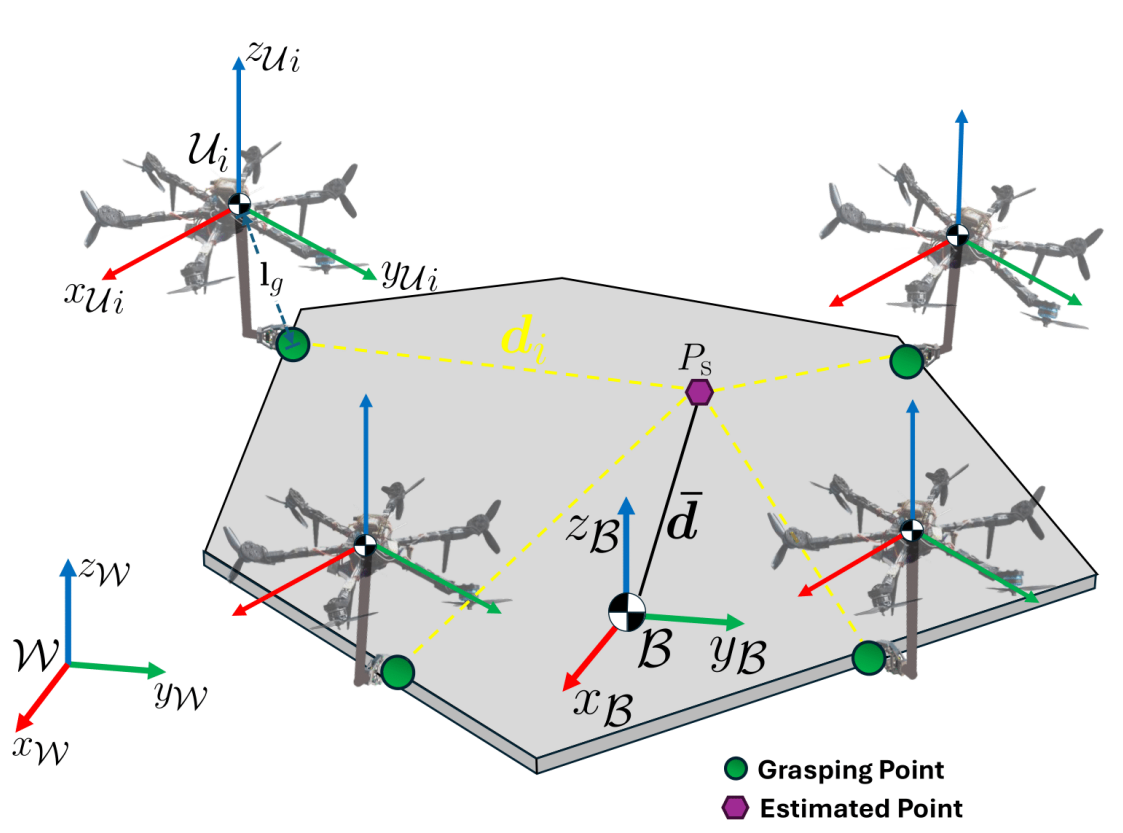
This project developed a decentralized adaptive controller for aerospace robots—including hexarotors and space tugs—to cooperatively transport unknown payloads in both Earth and zero-gravity environments. The system dynamically adapts to changes in object mass, inertia, and grasping points without prior knowledge. Using simulations in MuJoCo, researchers validated robust 6-DoF payload manipulation, even under robot loss scenarios. This work supports scalable and fault-tolerant aerial and space logistics and satellite servicing.
Leave a Reply