

UNM Students: Isaac Seslar, Riley McCarthy, Marlan Ball, Michal Rittikaidachar, Noah Jackson, Jean-Elie Pierre
ETH Zurich: Nasib Naimi, Luca Strässle, Jonathan Becker, Maurice Brunner, Julius Fricke
University of Zagreb: Antonella Barisic, Lovro Markovic, Stjepan Bogdan
Sandia National Labs: Steven Spencer, David Novick, Jonathan Salton
Senior Contributors: Dr. Rafael Fierro (UNM), Dr. Markus Höpflinger (Armasuisse, Switzerland), Xiang Sun (UNM)
Overview:
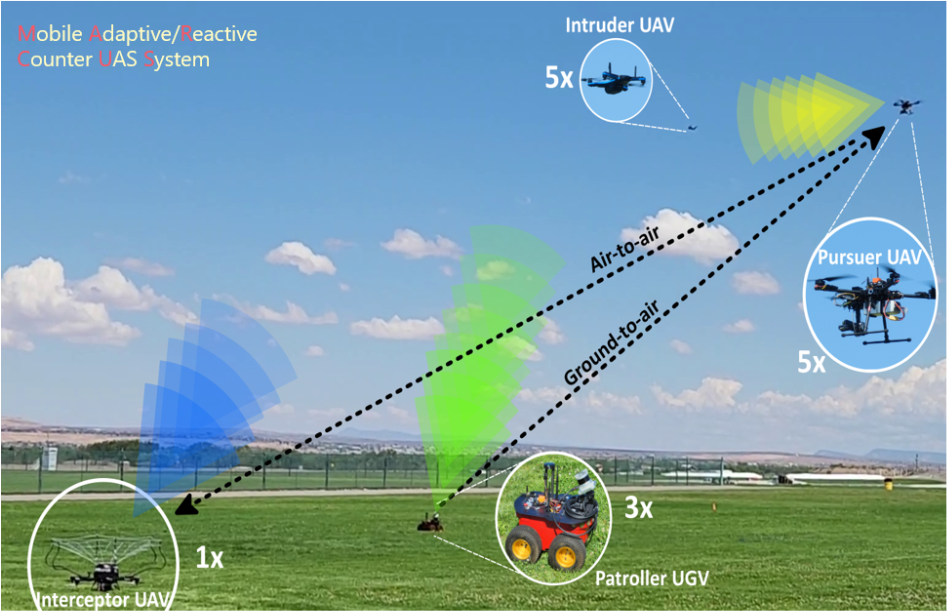
The Mobile Adaptive/Reactive Counter-Uncrewed System (MARCUS) is an international collaboration between the University of New Mexico, Sandia National Laboratories, ETH Zurich, the University of Zagreb, and Switzerland’s armasuisse. Supported by the NATO Science for Peace and Security Programme, the project addresses the rising threat posed by unauthorized drones (UAS) entering protected airspaces.
The MARCUS project develops a heterogeneous autonomous multi-robot system that can detect, track, and intercept rogue drones with minimal collateral damage. It combines ground-based mobile robots, aerial pursuer UAVs, and interceptor UAVs with capture mechanisms—each fitted with a diverse array of sensors including LiDAR, RGB-D cameras, radar, and stereo vision.
Key Features:
Runtime Assurance Control: Developed and implemented by Isaac Seslar, this ensures safe UAV operation by dynamically switching between high-performance and safety controllers when needed.
Deep Learning for Drone Detection: Using variants of YOLO and Kalman Filters for robust visual tracking in real-world and simulated environments.
Deep Reinforcement Learning (DRL): Algorithms like MAGNET and PPO-A2C were developed to train pursuers to collaborate while avoiding collisions in dynamic airspaces.
Multimodal Sensing: Integration of multiple sensor types improves robustness in unstructured or cluttered environments.
Field-Tested Systems: The final MARCUS architecture has been physically tested in outdoor environments, successfully demonstrating target detection, interception, and cooperative behavior between robots.
Applications:
MARCUS is aimed at protecting sensitive airspaces around:
- Airports
- Military installations
- Large public events
- Critical infrastructure
Its modular and scalable design makes it adaptable for future defense and civilian applications.
[3] Mobile Active/Reactive Counter UAS System-Partners. D Novick, R Fierro, M Hoepflinger – 2021
Leave a Reply